Importancia de la linealización
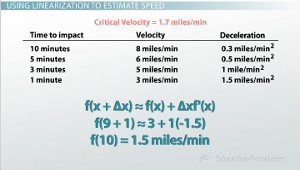 |
Mensaje urgente del Comando Espacial: ‘¡La nave espacial INTEGRAL 1 aterrizará en Marte en 10 minutos! Necesita abortar si es demasiado rápido. ¡Se necesita ayuda lo antes posible! ‘ ¿Del presidente? Será mejor que averigüemos esto pronto. Bien, esto es lo que está pasando: nuestra nave espacial, INTEGRAL 1, se está acercando a la superficie de Marte. Debe viajar a menos de 100 millas por hora (aproximadamente 1,7 millas por minuto) para poder aterrizar de forma segura. En este momento, va a 8 millas por minuto, que está más cerca de 500 millas por hora. Aterrizará en 10 minutos. Necesitamos saber si aterrizará de manera segura.
Entonces, ¿cómo vamos a hacer esto? Necesitamos usar lo que sabemos sobre linealización para averiguar si esta nave se ralentizará a tiempo antes de llegar a la superficie de Marte. Son 10 minutos hasta el impacto, la velocidad es de 8 millas por minuto y está desacelerando a 0.3 millas por minuto al cuadrado. Calculemos esto. Linealización. Vamos a estimar la velocidad en algún momento futuro observando la velocidad actual y la desaceleración. Recuerde que la desaceleración (o aceleración dependiendo de la dirección en la que vaya) es la derivada de la velocidad. Entonces, en este caso, llamaremos a nuestra velocidad f (x) , y nuestra aceleración es f` (x) , donde nuestra variable x es el tiempo. Entonces fen 10 minutos – nuestro tiempo actual ( x ) es cero, delta x va a ser 10 – es igual a nuestra velocidad actual, que es 8, más la cantidad de tiempo que tenemos (este delta x , 10), multiplicado por nuestra desaceleración , que es 0.3 millas por minuto al cuadrado. Es negativo porque estamos desacelerando. Cuando conecto eso, encuentro que en 10 minutos, si mantenemos este ritmo, vamos a ir a 5 millas por minuto, que es mucho más alta que nuestra velocidad crítica de 1,7 millas por minuto. ¿Cancelamos la misión? Bueno, 10 minutos es mucho tiempo. Quizás las cosas mejoren. Podemos cancelarlo hasta el último minuto. Así que esperemos.
Usar la linealización para estimar la velocidad
Han pasado 5 minutos desde la última vez que intentamos ver si íbamos a estrellarnos. Tenemos 5 minutos hasta el impacto. Actualmente, nuestra nave espacial va a 6 millas por minuto y desacelera a 0.5 millas por minuto al cuadrado. Usemos la linealización para predecir qué tan rápido irá dentro de 5 minutos. Así que estamos dentro de 5 minutos, donde delta x es 5 minutos y la linealización dice que nuestra velocidad es de 6 millas por minuto, más 5 minutos, multiplicado por nuestra desaceleración (-0,5). Conectando esto, tengo 6 – 2.5, que es 3.5 millas por minuto. Eso sigue siendo mucho más rápido que nuestra velocidad crítica de 1,7 millas por minuto. Pero nos estamos acercando, así que tal vez si esperamos un par de minutos más, tal vez reduzcamos la velocidad y no tengamos que abortar esta misión a Marte.
 |
Muy bien, son 3 minutos para impactar. Nuestra velocidad es de 5 millas por minuto, pero ahora estamos desacelerando a 1 milla por minuto al cuadrado. Si conectamos esto a nuestra linealización, estimamos que nuestra velocidad a los 10 minutos será aproximadamente nuestra velocidad actual (5 millas por minuto), más 3 minutos para impactar, multiplicado por nuestra desaceleración de -1, 5 + 3 (- 1 ) = 2. Bien, entonces nuestra velocidad estimada es de 2 millas por minuto. En este punto, todavía tenemos que cancelar la misión, pero podemos esperar un par de minutos más para asegurarnos de que realmente tenemos que cancelar la misión porque somos lo suficientemente lentos. Veamos qué pasa.
Es el momento de la verdad: hay 1 minuto para impactar. O lo cancelamos ahora mismo o los dejamos aterrizar. La velocidad a la que van es de 3 millas por minuto y están desacelerando a una velocidad de 1,5 millas por minuto al cuadrado. Entonces, conectando eso a nuestra linealización, su velocidad actual es de 3 millas por minuto, más 1 minuto para nuestro delta x , multiplicado por f` (x) , nuestra desaceleración, que es -1,5. Conectando todo eso, 3 + 1 (-1.5) … ¡Uf! 1,5 millas por minuto; esa es la velocidad con la que estamos estimando que aterrizarán. Eso está por debajo de su velocidad crítica de 1.7 millas por minuto, así que vamos a decir, ‘Sr. Presidente, déjelos aterrizar.
Capa de Transporte del Modelo OSI: Funciones, Seguridad y Protocolo
Ejemplos de linealización
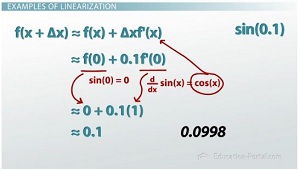
Entonces, ahora que nuestra nave aterrizó de manera segura, echemos otro vistazo a la linealización. La linealización es cómo estimas f en un número cercano a donde estás ahora. Entonces, f ( x + delta x ), donde delta x es bastante pequeño, es aproximadamente igual af (x) + delta x ( f` (x) ).
 |
Veamos un ejemplo. Veamos sin ( x ) cerca de x = 0. Me gusta llamar a esto la ‘manera rápida y sucia’ de encontrar el pecado (0.1). Entonces, para encontrar sin (0.1), voy a llamar delta x 0.1 y x 0. Entonces mi linealización, f ( x + delta x ), es realmente f (0.1) es aproximadamente igual af (x) , que es f (0) más delta x (0.1) por f` evaluado en cero. Bueno, mi función, f (x) , es sin ( x ) entonces f (0) = sin (0), que es simplemente cero. f` (x)es la derivada de sin ( x ). Entonces d / dx de sin ( x ) es igual a cos ( x ). Si quiero calcular la derivada de sin ( x ) en x = 0, estoy conectando cero en cos ( x ) y cos (0) = 1. Entonces estimo que f (0.1) es igual a 0 + 0.1 (1) o solo 0.1. Ahora, en realidad, si usa una calculadora para encontrar sin (0.1), obtendrá 0.0998, así que eso es bastante cercano.
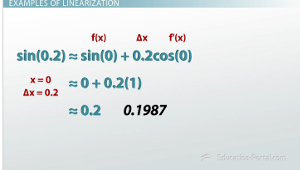
Bueno, ¿y si lo usara para calcular sin (0.2)? Bueno, de nuevo, voy a decir que x es igual a 0 y delta x es igual a 0,2. Entonces, sin (0.2) es aproximadamente igual a sin (0), esa es mi f (x) , más 0.2, esa es mi delta x , por cos (0), que es mi f` (x) . Eso me va a dar que sin (0.2) es aproximadamente igual a 0 + 0.2 (1) o solo 0.2. El valor real de sin (0,2) es 0,1987. De nuevo, todavía estás bastante cerca. No tan cerca como tú, pero sí bastante cerca.
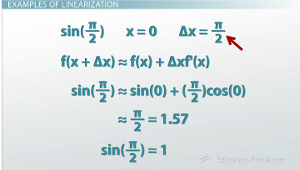
¿Qué pasa si miro sin ( pi / 2) y uso x = 0 y delta x = pi / 2? Bueno, mi f ( x + delta x ) va a ser sin ( pi / 2) – eso es aproximadamente igual a sin (0) – más pi / 2, por f` (x) , que es cos (0). Entonces sin ( pi / 2) será aproximadamente igual a pi / 2. Ahora pi / 2 es aproximadamente 1,57. El valor real de sin ( pi / 2) es 1. La diferencia entre 1 y 1,57 es bastante grande, y la razón por la que la diferencia es tan grande en este caso es porque nuestro delta xes de repente muy grande. No estamos mirando valores pequeños; no estamos mirando cerca. Estamos viendo algo que es 1,57. Entonces, esta linealización funcionó muy bien para 0.1 y 0.2, pero para 1.57, no funcionó tan bien.
 |
Resumen de la lección
Revisemos. La linealización es una forma de encontrar f ( x + delta x ) usando lo que sabes de x , como f (x) y f` (x) . Entonces, puede hacer esto con ambos datos, como en lo que hicimos con la misión a Marte, y también puede hacerlo mediante cálculo, como encontrar el seno de un número pequeño. Pero recuerde, siempre es mejor para valores pequeños de delta x . Siempre es mejor linealizar muy cerca de donde intenta ir.
CPU: Definición, funciones y piezas
Dispositivos de Entrada de Computadora: Tipos, funciones y ejemplos
Explora más sobre este tema
Selecciona un tema y sigue aprendiendo...
